
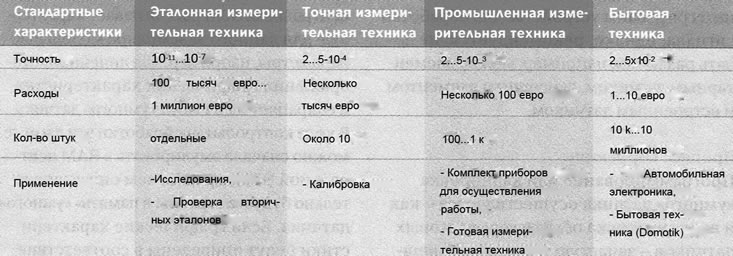
В таблице 1 сгруппированы и сопоставлены различные сферы применения датчиков. Рисунок 1 дает представление о многообразии уже существующих в автомобилях электронных систем, число которых, несомненно, возрастет в будущем.
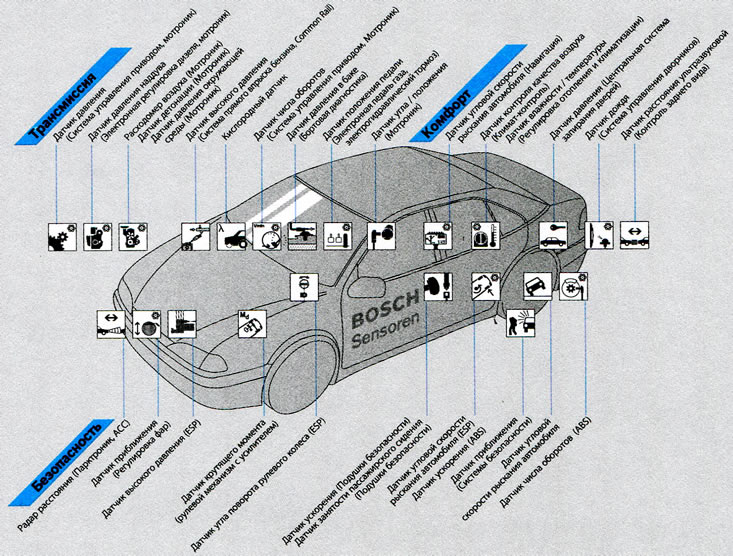
Рис. 1. Многообразие автомобильных систем с датчиками
Таблица 1. Области применения датчиков
Термин/определение датчик
В качестве электрических величин используют не только ток и напряжение, но и амплитуды тока и напряжения, частоту, период, фазу или длительность импульса электрического колебания, а также электрические величины — сопротивление, ёмкость и индуктивность. Датчик можно охарактеризовать с помощью следующих уравнений:
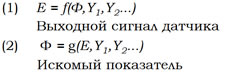
Если функции f или g известны, то они представляют собой модель датчика, с помощью которой рассчитывается искомый показатель по величинам выходного сигнала Е и параметров влияния Y практически безошибочно математическим способом («умные» датчики, англ: intelligent или smart sensors).
Рис. 2. Символ датчика
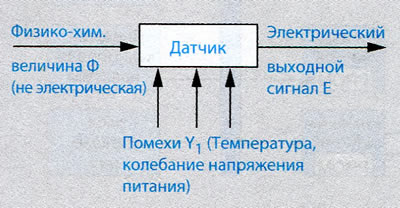
Рис. 3. Основная функция датчика
Регулировка (подгонки)
Модель датчика на практике имеет некоторые свободные параметры, с помощью которых можно осуществить калибровку (рисунок 4а) модели к фактическим характеристикам индивидуального экземпляра датчика. При цифровом сигнале датчика параметры калибровки модели чаще всего сохраняют в программируемом, энергонезависимом устройстве памяти (PROM).
В отличие от обычной аналоговой компенсации влияющих величин здесь можно успешно корректировать не только линейные воздействия, но и интенсивные нелинейные процессы. Большим преимуществом также является тот факт, что при таком способе калибровки, которые осуществляется исключительно посредством электрического соединения, каждый датчик можно откалибровать в процессе его эксплуатации.
Термин «умный» датчик. В достаточно обобщенной формулировке термин «умные датчики» (Smartsensor) можно определить следующим образом, умные, в некоторых случаях встроенные датчики, или датчики с индивидуальной особой электроникой, которые в месте использования называются просто датчиками, позволяют максимально использовать скрытую в датчике (статистическую и динамическую) точность с помощью средств микроэлектроники, в чем и состоит их отличие от обычных датчиков. При этом информация, полученная датчиком, особенно сложная информация структур, состоящих из нескольких датчиков, может сжиматься путем дополнительной обработки, т. е. отображаться уже на более высоком уровне (чем позволяет простой датчик), без необходимости использования большого числа внешних устройств.
Не существует четкого правила относительно того, должны ли в датчиках быть интегрированы устройства для обработки сигнала; однако, рекомендуется, не делать различий, например, между элементарным датчиком, сенсорным элементом и встроенным датчиком.
Процесс коррекции
Программирование или калибровка «умного» датчика осуществляется — как и корректировка обычных аналоговых датчиков — зачастую с помощью внешней ЭВМ (Host) в три этапа (рисунок 4).
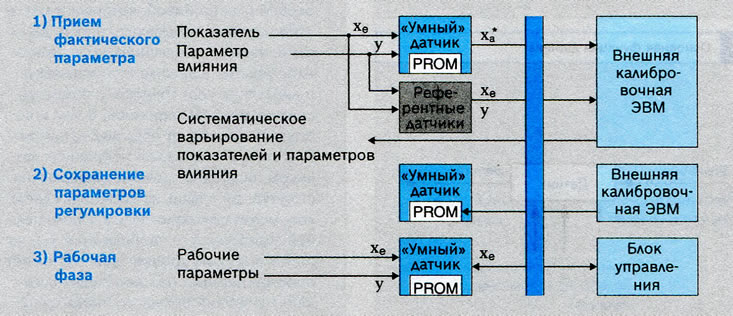
Рис. 4. Регулировка / калибровка «умного» датчика
Воспроизведение фактического значения Центральная ЭВМ систематически варьирует как показатель хе, так и параметр(-ы) влияния и настраивает при этом определенное количество релевантных и репрезентативных рабочих точек. При этом «умный» датчик отображает еще не откорректированные «чистые сигналы» хe. Посредством существенно более точных референтных датчиков центральная ЭВМ одновременно получает и «правдивые» величины хe и у. На основе сопоставления обеих величин центральная ЭВМ рассчитывает необходимый корректировочный параметр и интерполирует его на весь диапазон измерений.
Сохранение корректировочных параметров На основании ранее полученных данных центральная ЭВМ рассчитывает характерные для данного экземпляра модельные параметры, например, для линейного отображения графических характеристик, и сохраняет их в PROM «умного» датчика. В ходе контрольной обработки эти данные можно сначала эмулировать в RAM центральной ЭВМ, прежде чем они окончательно будут «встроены в память» «умного» датчика. Если графические характеристики будут приведены в соответствие с полиномами более высокой степени, то, во избежание затяжных процессов расчета, в «умном» датчике сохраняют также трехмерные графические характеристики (Look-up tables). Хорошо зарекомендовало себя сохранение характеристик с крупными ячейками в сочетании с простой линейной интерполяцией между опорными точками (пример на рисунке 5).
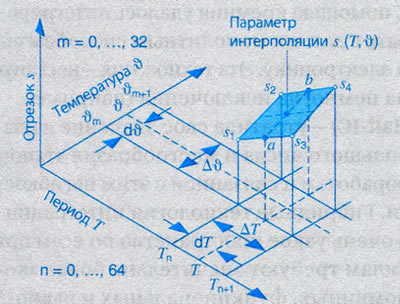
Рис. 5. Интерполирование показателя на трехмерную графическую поверхность опорных точек
Рабочая фаза
Теперь «умный» датчик отсоединяют от центральной ЭВМ, и он может практически без ошибок производить расчеты с помощью сохраненных модельных данных измеряемой величины хе. Он передает ее на подключенный блок управления, например, в цифровой форме, последовательным двоичным кодом или в аналоговой форме (например, с помощью импульсной модуляции). Посредством интерфейса шины измеряемая величина может передаваться цифровым способом на следующие блоки управления.
Этот процесс корректировки можно повторять, если используется стираемый PROM. Уже на этапе разработки датчиков это является преимуществом.
Пример: Двухкоординатная графическая поверхность опорных точек s (Tn, Θm) «умного датчика» для измерения отрезка s: Для высокоточной обработки датчика, который действует как переменная индуктивность, его естественная графическая характеристика и ее температурный режим приближены полиномам 5-ой степени. Он представляет собой элемент, выдающий частоту совершенно простой генераторной схемы как нескорректированный выходной’сигнал периода Т. В качестве модели датчика для отрезка s вместо 36 коэффициентов полинома и длительной обработки полинома учитывается (записывается в файл) только общая графическая поверхность, включающая 32х64=2048 характерных параметра Sn,m (в PROM) и простой интерполяционный алгоритм (в ROM). Если сигнал Т появляется между опорными точками Tn и Tn+1, а температура Θ между опорными точками Θm и Θm+1, то, как показано на рисунке, интерполирование осуществляется двухмерно между «безошибочно» сохраненными нормативными параметрами s1,...s4, и искомый параметр s (T, Θ) определяется как результат интерполяции.